Most of the rock surfaces in Gale Crater are covered by dust, making many photos have very low contrast and with little variation in color. By stretching each color to near the full range available, small differences are emphasized. The bluish tones here are not near the true colors, but are blue only in comparison to other surfaces; because the dust is redish, blues and greens are stretched more.
Most of the variation appears to be due to differing thickness of dust on the surfaces.
SmoothLife Cellular automata are implemented as rules on a discrete grid. This seems to limit the range of possible behaviors, as the rules depend on a finite number of neighbors. SmoothLife is also implemented on a (rectangular) grid, but the rules approximate continuous functions on a large set of neighbors. Finding parameter sets that display interesting behavior is more difficult, but this example shows that motion of coherent structures (gliders) in any direction is possible. Source code. Paper describing the implementation.
A visual interface designer with a huge ego criticizes the way everyone else programs, arguing thusly:
The goals of a programming system should be:
to support and encourage powerful ways of thinking
to enable programmers to see and understand the execution of their programs
A live-coding Processing environment addresses neither of these goals. JavaScript and Processing are poorly-designed languages that support weak ways of thinking, and ignore decades of learning about learning. And live coding, as a standalone feature, is worthless.
Alan Perlis wrote, "To understand a program, you must become both the machine and the program." This view is a mistake, and it is this widespread and virulent mistake that keeps programming a difficult and obscure art. A person is not a machine, and should not be forced to think like one.
Cory Doctorow's take: Chinook's story is a bittersweet and moving tale, a modern account of John Henry and the steam-drill, though this version is told from the point of view of the machine and its maker, Jonathan Schaeffer, a University of Alberta scientist who led the Chinook team. Schaeffer's quest begins with an obsessive drive to beat reigning checkers champ Marion Tinsley, but as the tale unfolds, Tinsley becomes more and more sympathetic, so that by the end, I was rooting for the human.
"...a time-ordered stream of documents that functions as a diary of your electronic life; every document you create and every document other people send you is stored in your lifestream. The tail of your stream contains documents from the past (starting with your electronic birth certificate). Moving away from the tail and toward the present, your stream contains more recent documents --- papers in progress or new electronic mail; other documents (pictures, correspondence, bills, movies, voice mail, software) are stored in between. Moving beyond the present and into the future, the stream contains documents you will need: reminders, calendar items, to-do lists."Eric Freeman, David Gelemter in Lifestreams Project Home Page
Lifestreams represent a source of information about people's intents that can be mined.[3]
The English amateur mathematician William Shanks, a man of independent means, spent over 20 years calculating pi to 707 decimal places. This was accomplished in 1873, although only the first 527 were correct. His routine was as follows: He would calculate new digits all morning; and then he would spend all afternoon checking his morning's work. This was the longest expansion of pi until the advent of the electronic digital computer three-quarters of a century later.
The Stern–Brocot tree was discovered independently by Moritz Stern (1858) and Achille Brocot (1861). Stern was a German number theorist; Brocot was a French clockmakerwho used the Stern–Brocot tree to design systems of gears with agear ratioclose to some desired value by finding a ratio ofsmooth numbersnear that value.
Generally, the approximation of real numbers by rational numbers is called Diophantine approximation. It is a well developed part of number theory, uncommonly rich in ideas and still an active field. The 2022Fields Medalwas awarded toJames Maynard, in part for his work on Diophantine approximation.
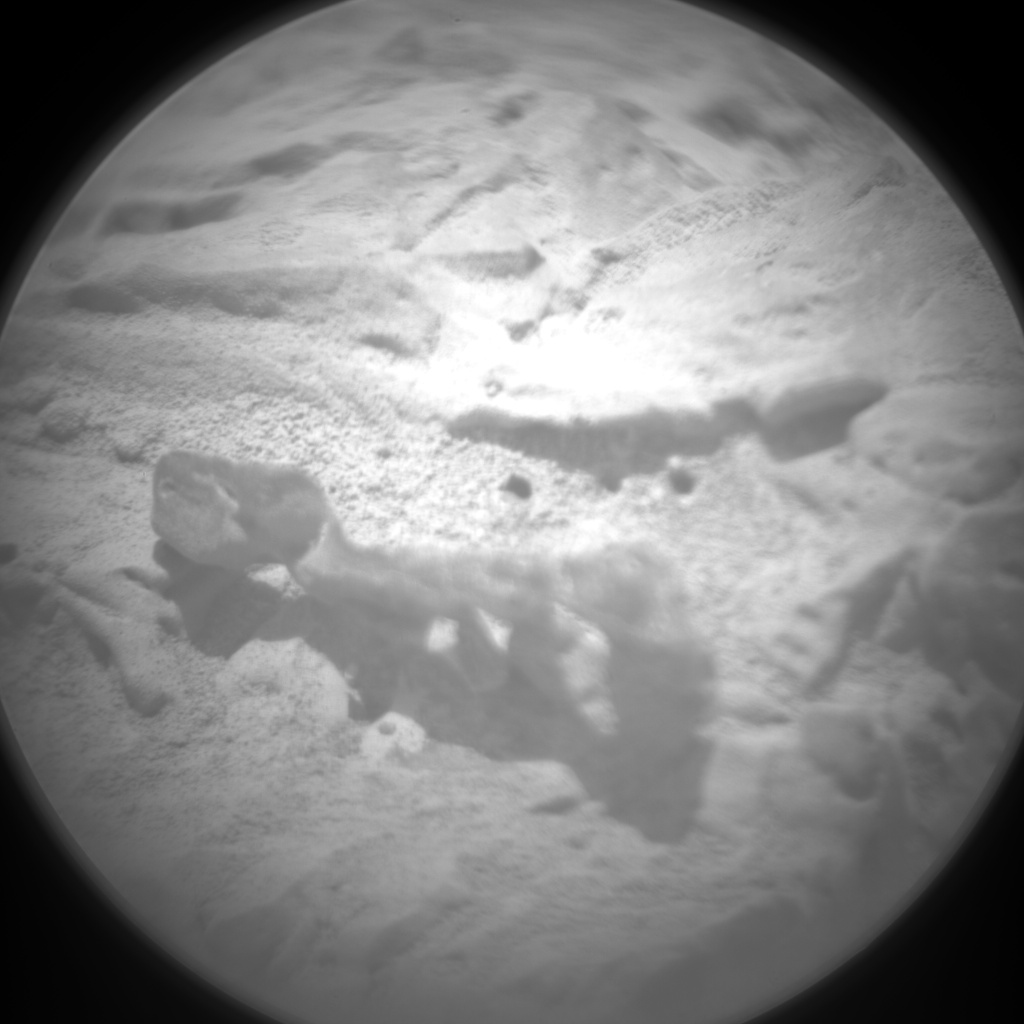
An extraordinary rock formation, photographed with a Curiosity mast camera a few days ago, recieved and released today.
[10/26/12: See update at bottom, from a JPL video that gives a better but incomplete description of what they know about this feature they call "Zephyr" or "Stonehenge".]
It appears to be a row of harder bluish rock blobs with the underlying substrate rock partially eroded away. Is it a ventrifact? Presumably most erosion is due to wind driven abrasion. These pillars are vertical and sandblasting would be expected to undercut harder material, but it's strange that the pillars survived. The bluish caps have a slightly specular surface, and look like they may be translucent with a distinct lower boundary and opaque supporting rock.
The three dark "holes" in the sand behind the pillars are remains after Curiosity laser blasting.
blue capped pillars
There doesn't appear to be any sort of continuation of the form, as you might see in an eroded dyke. I'm guessing they are agate:
Most agates occur as nodules in volcanic rocks or ancient lavas where they represent cavities originally produced by the disengagement ofvolatiles in the molten mass which were then filled, wholly or partially, by siliceous matter deposited in regular layers upon the walls.
In the formation of an ordinary agate, it is probable that waters containing silica in solution—derived, perhaps, from the decomposition of some of the silicates in the lava itself—percolated through the rock and deposited a siliceous coating on the interior of the vapour-vesicles.
8/23/12
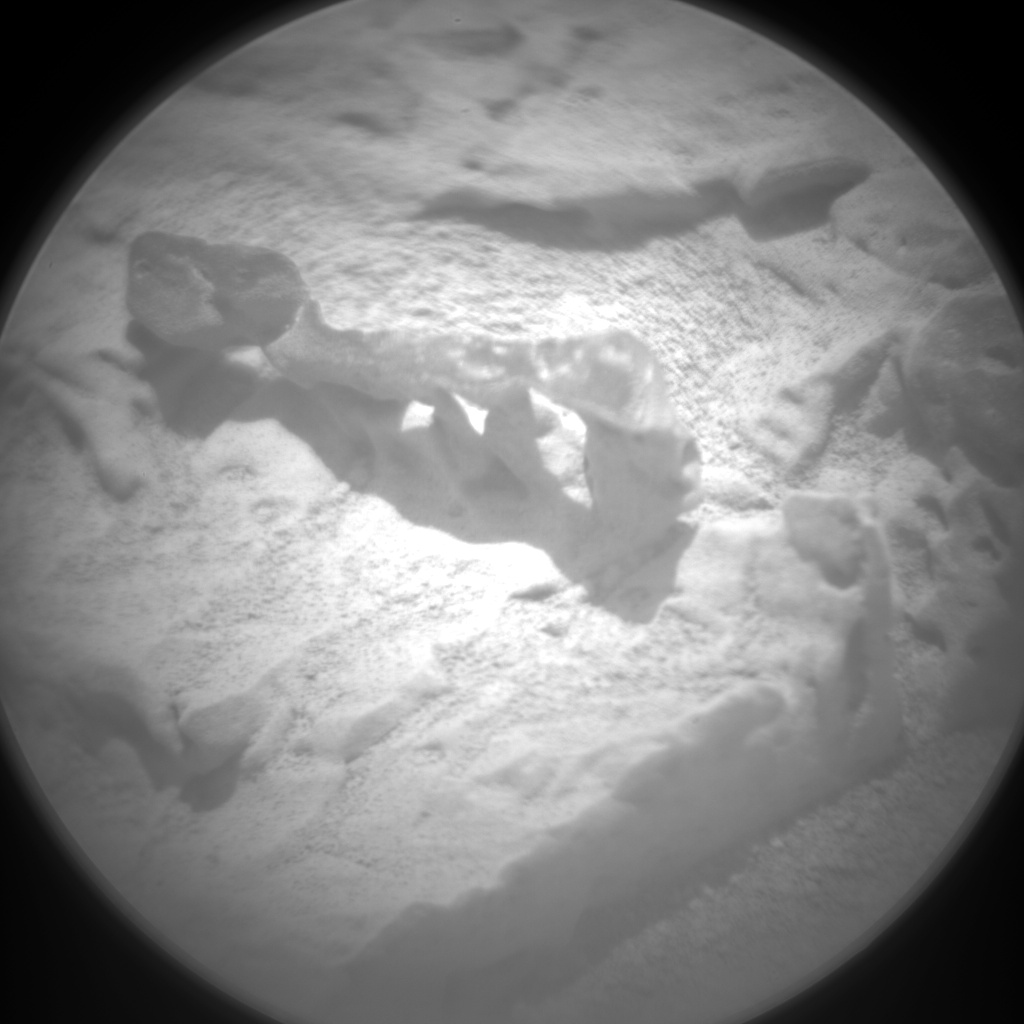
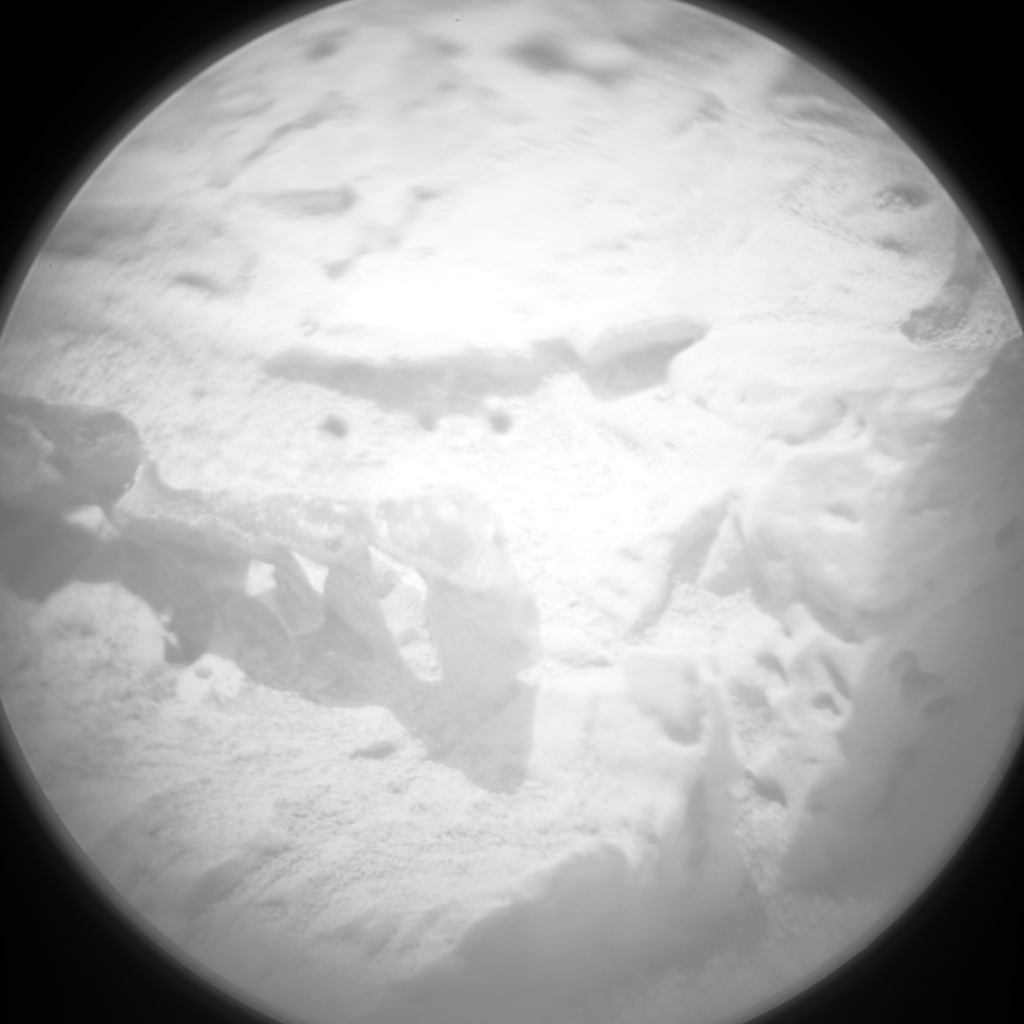
JPL is on it. Here's a ChemCam photo. Notice that the three "holes" (and a fourth, less visible) in the sand behind the formation don't appear in this shot (see below for comparison after shot), but the shadows are in a similar position (a slightly higher sun angle). A close-up photo is needed, if only for the beauty and mystery.
Original image, taken: 2012 OCT 17 21:03:22 EDT, 17 minutes and 22 seconds after the above image. There are also disturbances below the pillars, near the shadow line.
Drat, it missed!! More target practice required, autonomous mode. Don't these robot overlords practice with shoot-em-ups? I count six misses, including a couple at the base of the pillars, and some pebbles scattered.
1/23/12 New photo that's more in focus showing that Curiosity had a direct hit, although it is close to the boundary between the blue cap rock and substrate. Original image, taken: 2012 OCT 23 00:37:01 EDT
Here's the comparison, coregisteed to the single "before" image.
No word yet from JPL on whether they saw a silica signal to be expected from an agate.
This feature is really only an inch long and we're shooting this from about 8 feet away, making the pointing very difficult. So that's why we decided to do 9 points instead of just 2, just to make sure we would hit the material of interest. We ended up hitting both the dark and the light material and we found that there was indeed a compositional difference.
1" scale bar
This feature is really only an inch long and we're shooting this from about 8 feet away, making the pointing very difficult.
JPL marking of laser hits
You can see that this isn't a good representation of where the laser actually hit: two or three of them are just wrong. It's irritating that JPL hasn't released data or results of the spectroscopy.
Stereo pair of a patch of pebbles, dust and a scrap of distressed pastic (about 13mm long), using Curiosity's Mars Hand Lens Imager (MAHLI). The camera was shifted by about 7mm between the views.
NASA speculates that the plastic was part of the delivery vehicle, presumeably shredded during landing and carried by Curiosity to this location about a half-kilometer from the landing site. But if they know what part it is from, they aren't saying.
(stereo pairs, cross-view)
The trash was unexpectedly spotted at bottom center of this photo of the first scoop of soil. It is more visible in the original full size image.
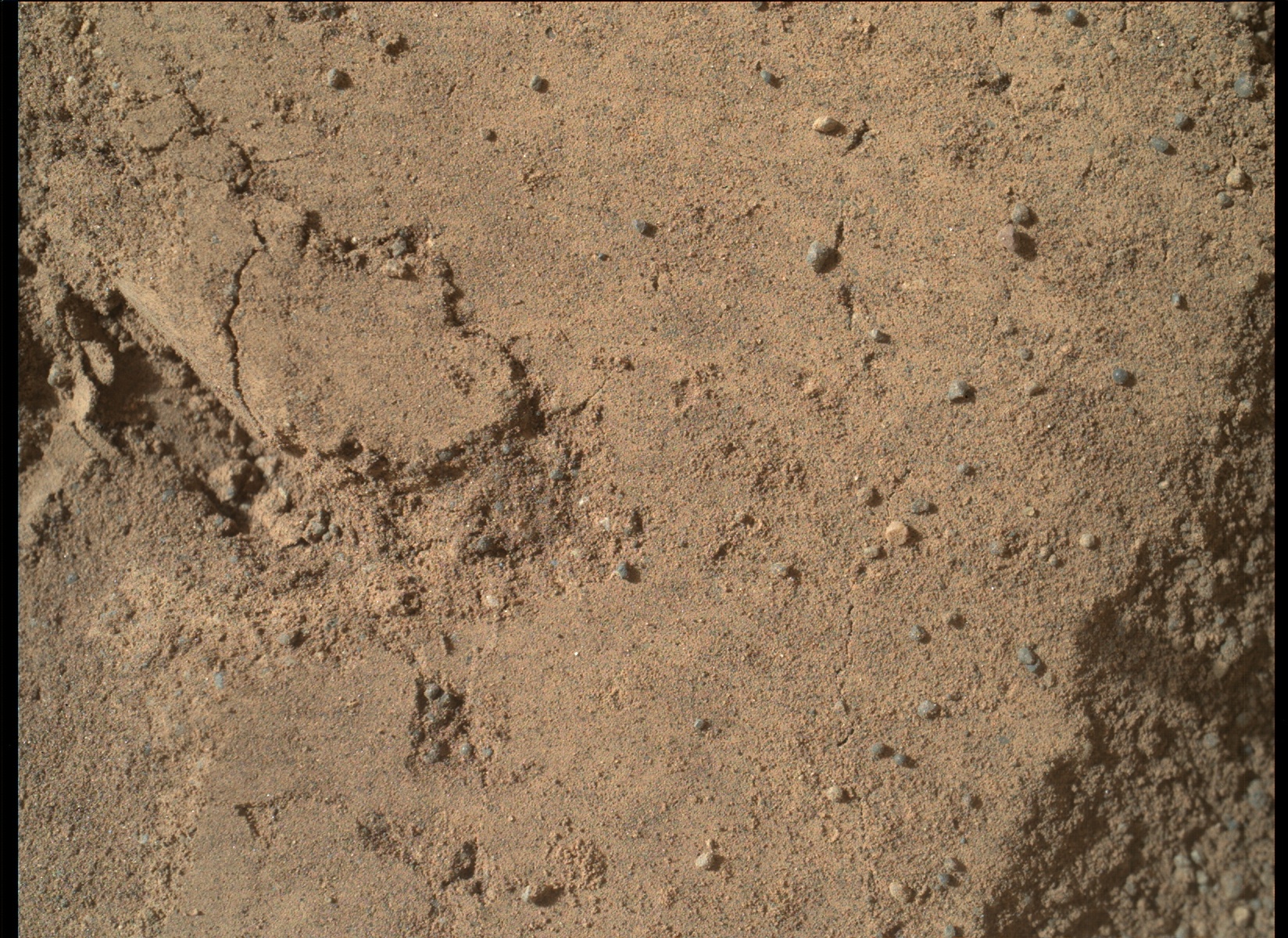
It was a good opportunity to get a high resolution shot of the pebbles covered, and interspersed with, dust.
The two images were taken about 5 minutes apart, with indirect sunlight.
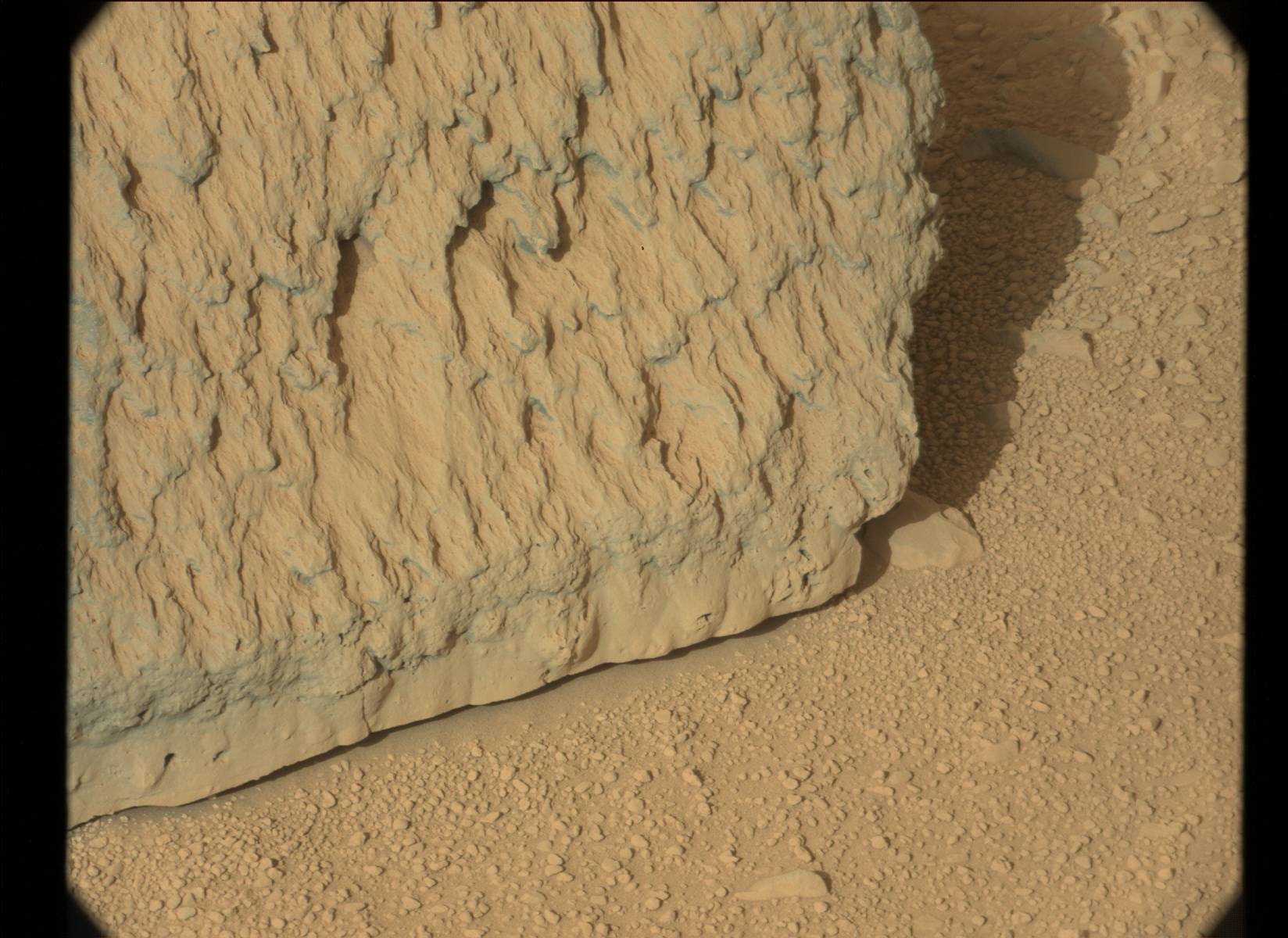
Sand ripple on patch of ground named Rocknest. I don't know the exact scale, but it looks to be about 30-60 cm wide. The small blobs of texture seem to be pebbles coated in dust.
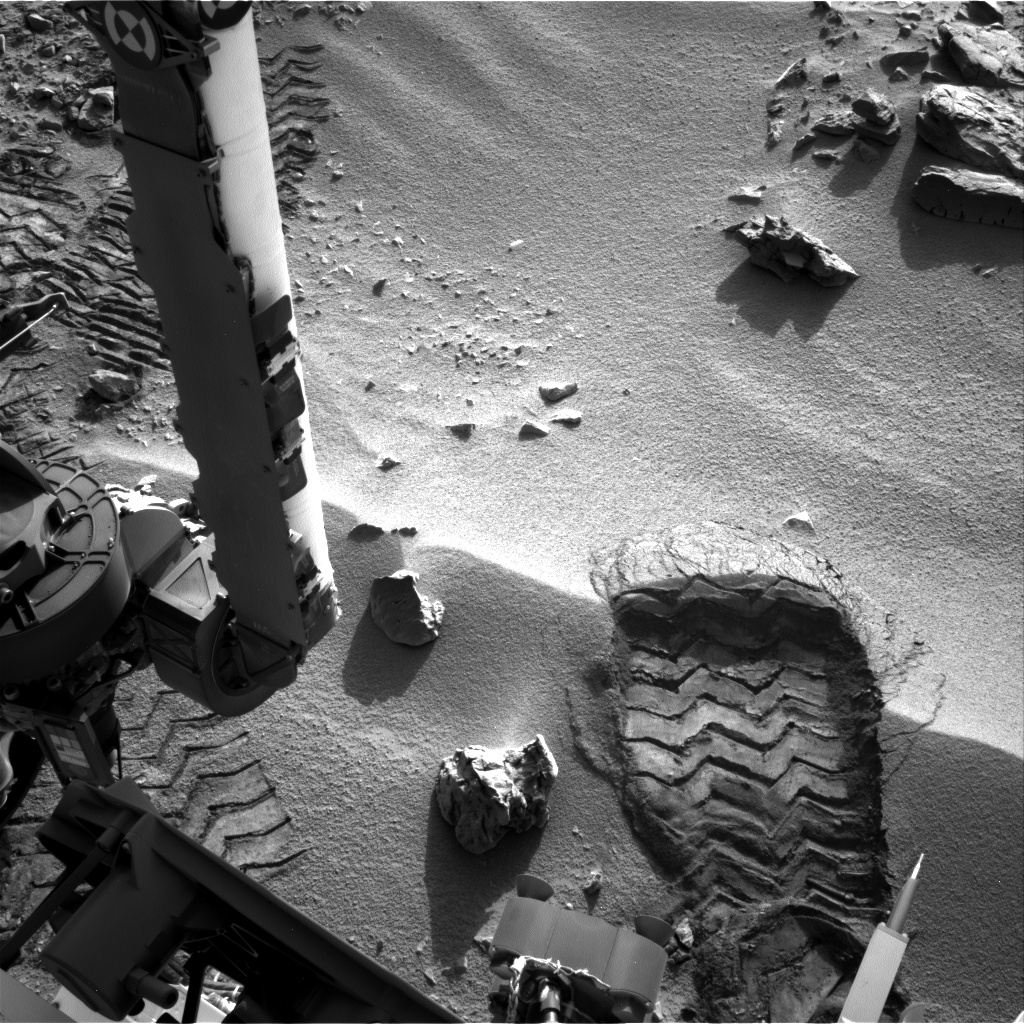
Closer view at edge of imprint:
"The largest grains ... are about 0.04 to 0.08 inches (1 to 2 millimeters) in size. The bulk of the sand in the ripple is smaller, in the range below 0.002 to 0.008 inches (50 to 200 microns).
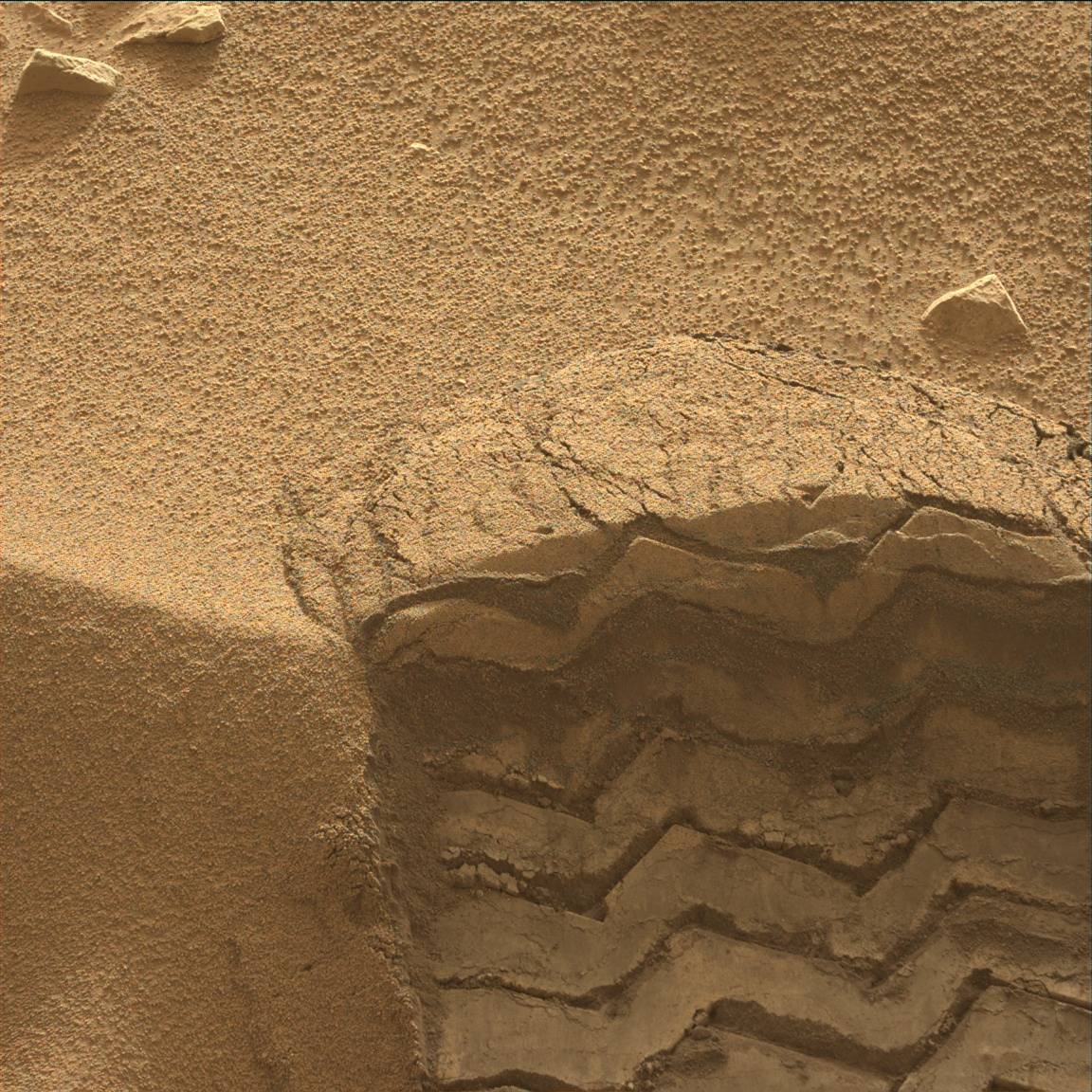
Wheels of Curiosity that made the impressions. Each is about 40 cm wide. Notice the fine linear texture of the left wheel in the highlight. This pattern is seen as horizontal bands in the dust (two images above, top). Original.
Is this due to an unusually high albedo? It might be just a flat face with high specular relflectance, but there is no other like it in any other field of view, so it seems statistically unlikely. Perhaps it is a boundary between radically different sediment layers, deposited as ejecta from some meterorite hit. An evaporite?
The shadowed side is consistent with the lightness extending through the body of the rock. And there appears to be a darker band between the top and bottom portions.
These exposures at different times of day (note the shadows) show that there is not a lot of specular reflection.
from http://mars.jpl.nasa.gov/msl-raw-images/msss/00020/mcam/0020MR0056005000C0_DXXX.jpg
from http://mars.jpl.nasa.gov/msl-raw-images/msss/00019/mcam/0019MR0059002000C0_DXXX.jpg
The navigation cameras (Navcam) take beautiful 1000 x 1000 pixel stereo pairs. These views, with the shallow pits caused by the jet wash, are from sol 16 after Curiosity moved a short distance from its landing position.
Navcam A, stereo pair (cross-view)
Navcam A, stereo pair (cross-view)
Here's the plan view of these features, and Curiosity, from this vantage point:
"And then... Try to imagine all this sequence of landing and preparations as you were standing there and watching. Friggin metal spider with rocket engines lowers this car sized rover, flies away and crashes. This rover then sits there for couple sols without any movement. But from time to time it makes some tiny sounds, moves it's robotic arm, turns camera. And sits there again for hours. Zaps a tiny rock with laser. On one sol it starts moving. Moves couple meters here and there, turns around, goes silent again. It's like from some sci-fi book, except we actually are (let's get back to Earth) here and experience it. Not directly, but.. Hey, how cool is that every day we commute to work, hang out with friends and have new pictures coming to our pockets from another friggin planet hundreds of millions kilometres away. I think I need a drink now." Tadas Jelinek, comment on Boing Boing post.
Original pictures:
Navcam: Left and Right A (NAV_LEFT_A, NAV_RIGHT_A) onboard NASA's Mars rover Curiosity on Sol 16 (2012-08-22 15:02:31 UTC):
Half tau is not imaginary, but logarithms of negative numbers can be.
Secnarf got me interested in the function x^x, which is real valued for positive values of x, but wonderfully complex for negative x.
Functions that are powers of a variable are often more simple after taking a logarithm of the function, so I was curious what ln(x^x) might look like:
Sure enough, the imaginary part of this function is piecewise linear. What are the slopes of these segments? For that we just need the derivative with respect to x, d( ln( x^x) )/dy (function in blue, derivative in magenta):
The imaginary part of the derivative (bottom, magenta), shows that the slope is constant, a bit more than 3. In fact, the slope is exactly half tau.
Something similar happens (for the same reason) when we take the logarithm of both sides of Euler's identity:
ln( e^i*τ/2 ) = ln( -1 )
which can be used as defining the logarithm of a negative number. This reduces to:
i * τ/2 = ln( -1 )
So half tau is the magnitude of the imaginary part of the natural logarithm of -1:
I'm going to take this new Massachusetts Institute of Technology (MIT) course offering:
6.002x (Circuits and Electronics) is an experimental on-line adaptation of MIT’s first undergraduate analog design course: 6.002. This course will run, free of charge, for students worldwide from March 5, 2012 through June 8, 2012.
[The course] has been designed for online students, with a virtual laboratory, e-textbooks, online discussions and videos that are the equivalent of a lecture. It is expected to take 10 hours per week and will run until June.
Anant Agarwal, one of the course teachers, says it has been "designed to try to keep it engaging".
I'm particularly interested in how well they can pull off an online course like this, how engaging and/or frustrating it might be. I know a lot of the material that will be covered, but it's not my specialty.
I'm tinkering with an Arduino microcontroller and it will be a good way to increase my design capabilities. It would be nice to replicate and extend some of the labs on the Arduino, to get the full experience of handling real devices and physical problems, instead of idealized simulacrums. Someone should make parallel lab instructions for Arduino. Maybe I'll try putting one together myself.
Course description:
Designed to serve as a first course in an undergraduate electrical engineering (EE), or electrical engineering and computer science (EECS).
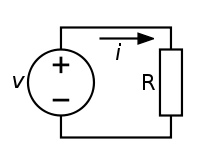
Introduces the lumped element model, a standard analytic tool for describing the dynamics of circuits (and similar systems).
(Example representation of a lumped model made up of a voltage source V and a resistor R, with electric current i. This model of an electronic circuit makes the simplifying assumption that the attributes of the circuit, resistance, capacitance, inductance, and gain, are concentrated into idealized electrical components; resistors, capacitors, and inductors, etc. joined by a network of perfectly conducting wires.)
Topics covered include: resistive elements and networks; independent and dependent sources; switches and MOS transistors (MOSFET); digital abstraction; amplifiers; energy storage elements; dynamics of first- and second-order networks; design in the time and frequency domains; and analog and digital circuits and applications. Includes design and lab exercises. Approximately 10 hours per week required.
A unified treatment of circuits and electronics, establishing a strong connection with digital systems. Introduces a new way of looking at the treatment of circuits and introductory coursework in engineering in general.
The book attempts to form a bridge between physics and large computer systems. Treats electrical engineering and computer science as the creation and exploitation of abstract models to manage the complexity of building electrical systems.
Prerequisites:
AP level physics course in electricity and magnetism. Basic calculus, linear algebra, some background in differential equations. The first half of the course will include an optional remedial differential equations component.
Course staff include:
Anant Agarwal
Director of Computer Science and Artificial Intelligence Laboratory (CSAIL). Parallel computer architectures and cloud software systems, founder of several startups, including Tilera that produces scalable multicore processors. Co-authored the course textbook.
Gerald Jay Sussman
Educator in computer science, author of Structure and Interpretation of Computer Programs, the creator of Scheme. Artificial intelligence, physics, chaotic systems, supercomputer design.
Piotr Mitros
Techniques from control systems to optimize the learning process, analog designer at Texas Instruments, Talking Lights. Designed the analog front end for a novel medical imaging modality for Rhythmia Medical.
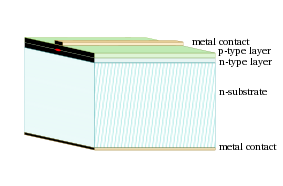
A laser diode is formed by doping a very thin layer on the surface of a crystal wafer. The crystal is doped to produce an n-type region and a p-type region, one above the other, resulting in a p-n junction, or diode.
...
When an electron and a hole are present in the same region, they may recombine or "annihilate" with the result being spontaneous emission — i.e., the electron may re-occupy the energy state of the hole, emitting a photon with energy equal to the difference between the electron and hole states involved. Spontaneous emission gives the laser diode below lasing threshold similar properties to an LED.
The structure, a lasing medium between two conductive partial mirrors, is simple:
The physical chemistry is more complicated, and it took a lot of research to find out how to get it right so they work at room temperature, are cheap, and last a while.
This is a visible light micrograph of a laser diode taken from a CD-ROM drive. Visible are the P and N layers distinguished by different colours. Also visible are scattered glass fragments from a broken collimating lens.
The first laser diode to achieve continuous wave operation was a double heterostructure demonstrated in 1970 essentially simultaneously by Zhores Alferov and collaborators (including Dmitri Z. Garbuzov) of the Soviet Union, and Morton Panish and Izuo Hayashi working in the United States. However, it is widely accepted that Zhores I. Alferov and team reached the milestone first. For their accomplishment and that of their co-workers, Alferov and Kroemer shared the 2000 Nobel Prize in Physics.
I don't think computers will have any important effect on the arts in 2007. When it comes to the arts they're just big or small adding machines. And if they can't "think," that's all they'll ever be. They may help creative people with their bookkeeping, but they won't help in the creative process.
Simultaneous localization and mapping (SLAM) on an iPad2:
Art && Code: 3D is a festival-conference about the artistic, technical, tactical and cultural potentials of 3D scanning and sensing devices — especially (but not exclusively) including the revolutionary Microsoft Kinect sensor. This highly interdisciplinary event will bring together, for the first time, tinkerers and hackers, computational artists and designers, industrial game developers, and leading researchers from the fields of computer vision, HCI and robotics. Half-maker’s festival, half-academic symposium, Art && Code: 3D will take place October 21-23 at Carnegie Mellon University in Pittsburgh, and will feature:
Omek Interactive, a provider of tools that enables companies to incorporate gesture recognition and full body tracking into their applications and devices, has secured $7 million in financing in a round led by Intel Capital, TechCrunch has learned. The Series C round brings the company’s total funding raised to nearly $14 million.
Omek’s Beckon technology converts the raw depth map data from most major 3D cameras into an awareness of people and their movements or positions in front of the camera, enabling them to be converted into commands that control hardware or software.
Nearly a million people have watched UC Berkeley's PR2 folding towels and sorting socks on YouTube, and it's easy to understand why: having a robot that can do your laundry is a fantasy that's been around since The Jetsons, and while we're not there yet, it's not nearly as far off a future as it was before the PR2 Beta Program. Since those demos, one of the research groups at Berkeley has been working on ways of making the laundry cycle faster, more efficient, and more complete, and for starters, they've taught their PR2 to reliably handle your pants.
The goal of Pieter Abbeel’s group is to teach a robot to solve the laundry problem. That is, to develop a system to enable a robot to go into a home it's never seen before, load and unload a washer and dryer, and then fold the clean clothes and put them away just like you would. The first aspect of this problem that the group tackled was folding, which is one of those things that seems trivial to us but is very difficult for a robot to figure out since clothes are floppy, unpredictable, and often decorated with tasteless and complicated colors and patterns.
Although robots have made great strides in manufacturing, where tasks are repetitive, they are still no match for humans, who can grasp things and move about effortlessly in the physical world. Designing a robot to mimic the basic capabilities of motion and perception would be revolutionary, researchers say, with applications stretching from care for the elderly to returning overseas manufacturing operations to the United States (albeit with fewer workers).
Yet the challenges remain immense, far higher than artificial intelligence hurdles like speaking and hearing.
7x21 pixel display, and is 2.5 x 7 feet in size, using an Arduino Decimillia board.




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}