Things are different on Mars: it's generally dry, with a thin breeze blowing dust across most landscapes for billions of years. Many rock formations are recognizable as volcanic or sedimentary formations. But some things big and small are hard to explain. NASA/JPL scientists are having a field day, but they won't say what they might be thinking for fear of being hyperbolic or just wrong. They won't even point out the things they find interesting. We'll have to wait for the papers, or more accurately the press reports after the papers have been published, long after the observations were made.
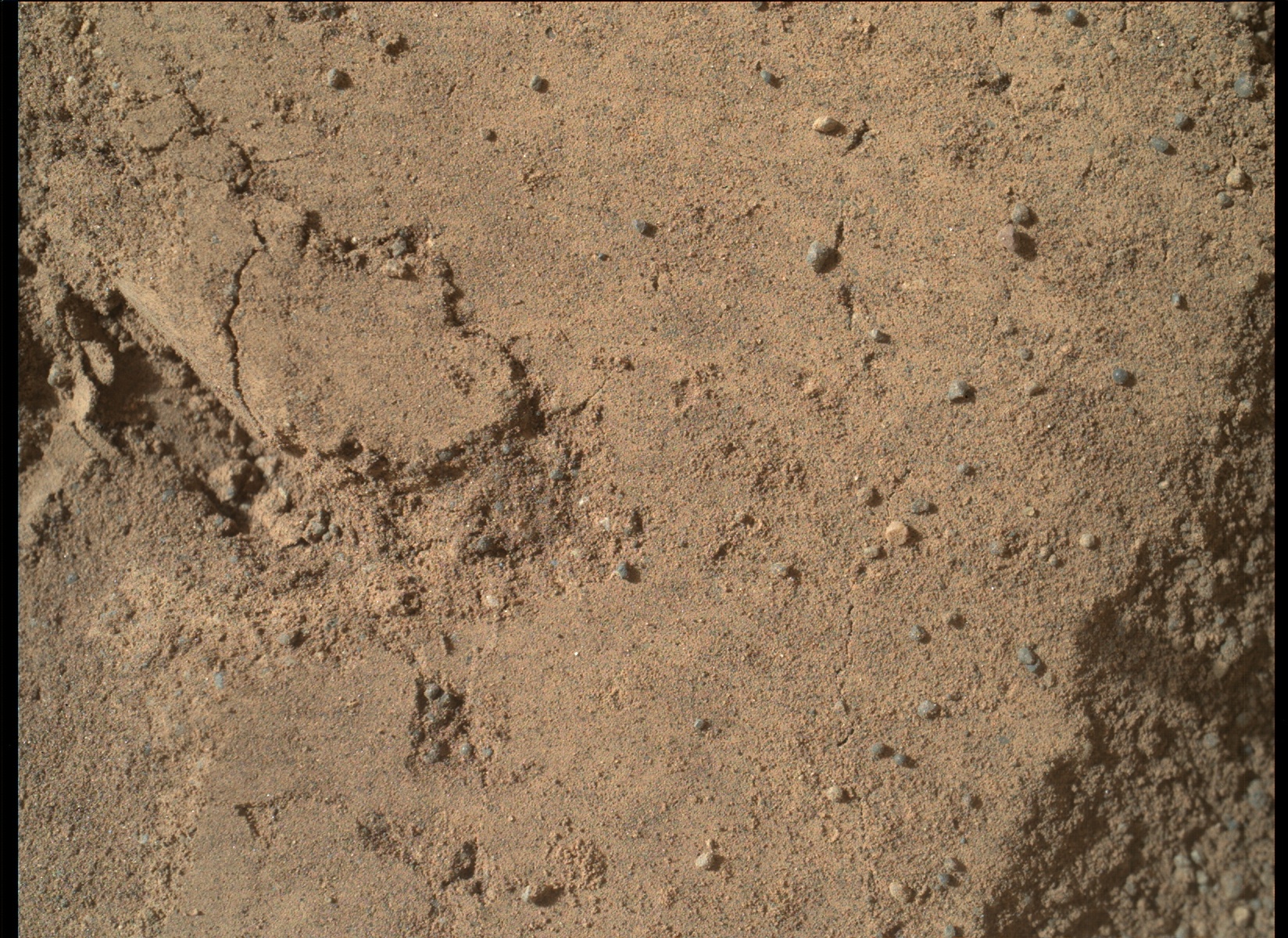
What is the ring in the photo (below) from the left and right navigation camera photos? It appears to be a thin walled cup-like mineral formation rooted in the rock below, partly filled with sand. I imagine it formed within the rock and is now in the process of eroding out, preserved because it is more resistant to slight sand-blasting over a long period of time.
(stereo pairs, cross-view)
And what formed the small trench to the left of the 'cup'? This surface is undisturbed by Curiosity. There are now hundreds of photos of nearby sufaces, but nothing like this. It looks like suface dust and pebbles are falling into the trench, so maybe there's some kind of sub-surface void between the rock on the left and right (which appear to be from different formations).
A third photo from a slightly different angle doesn't give any more hints.
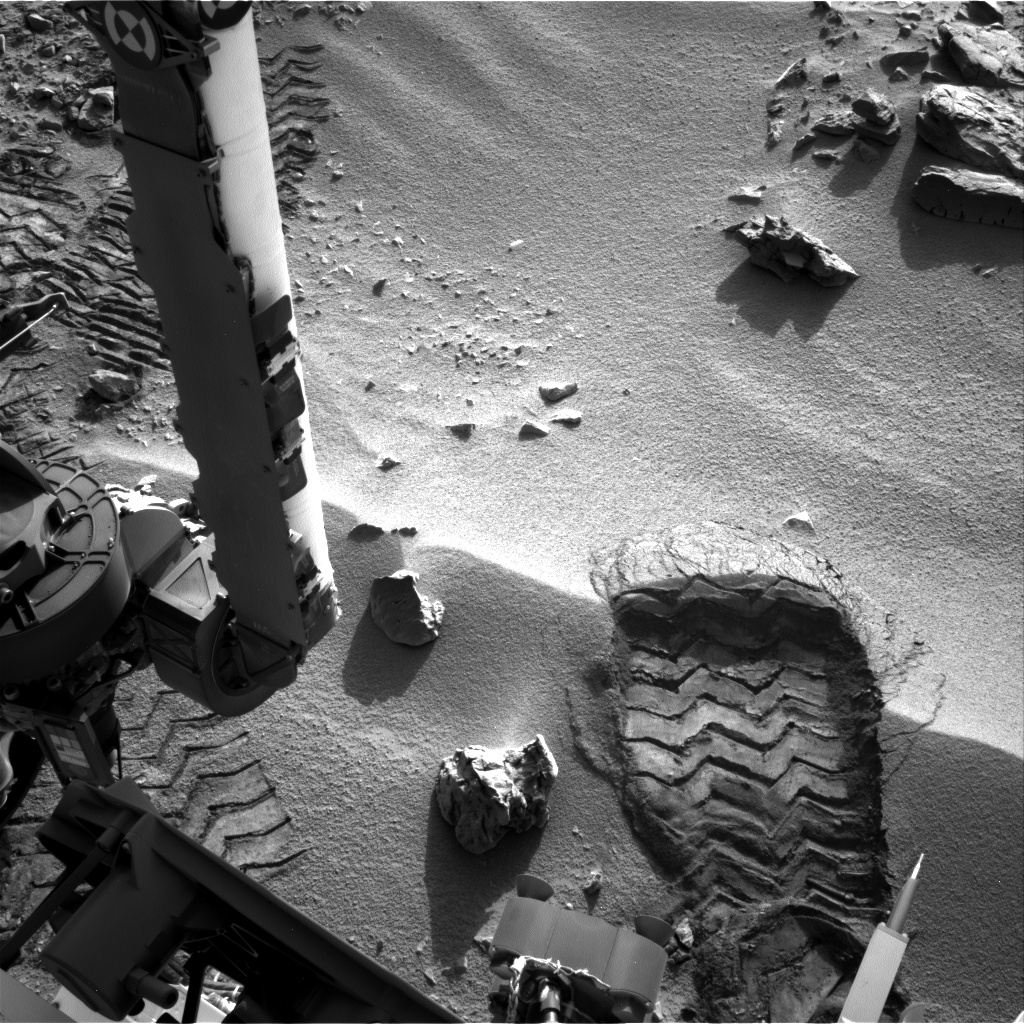
And one more mystery; what is up with the rounded, pitted, partially buried cobble below the 'cup'? Rounded things are quite rare on Mars. In fact there seems to be more pyramidal rocks, with points straight up, than one would expect from randomly fractured rock, randomly splayed across the surface. In thousands of Curiosity images I don't remember seeing anything quite as spherical as this.
Here's a wider view, with these features at left, just below center:
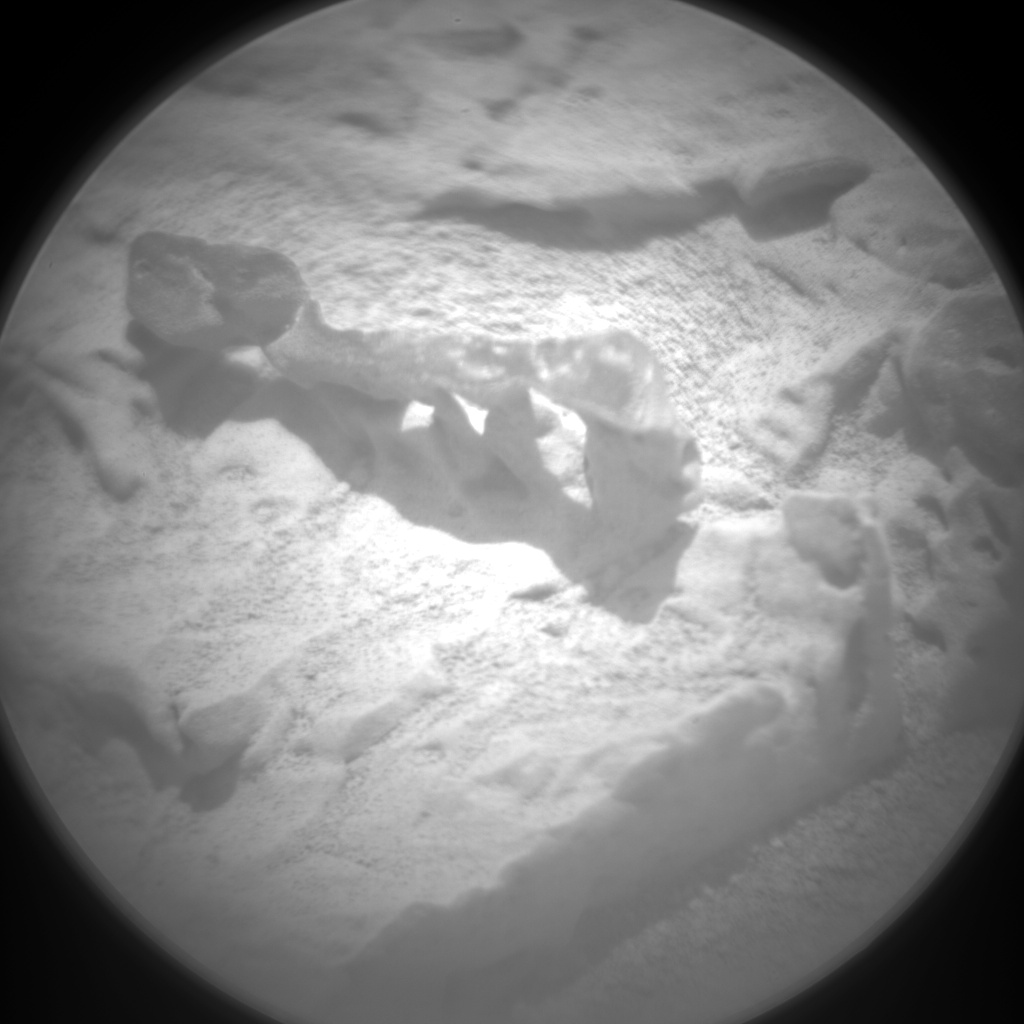
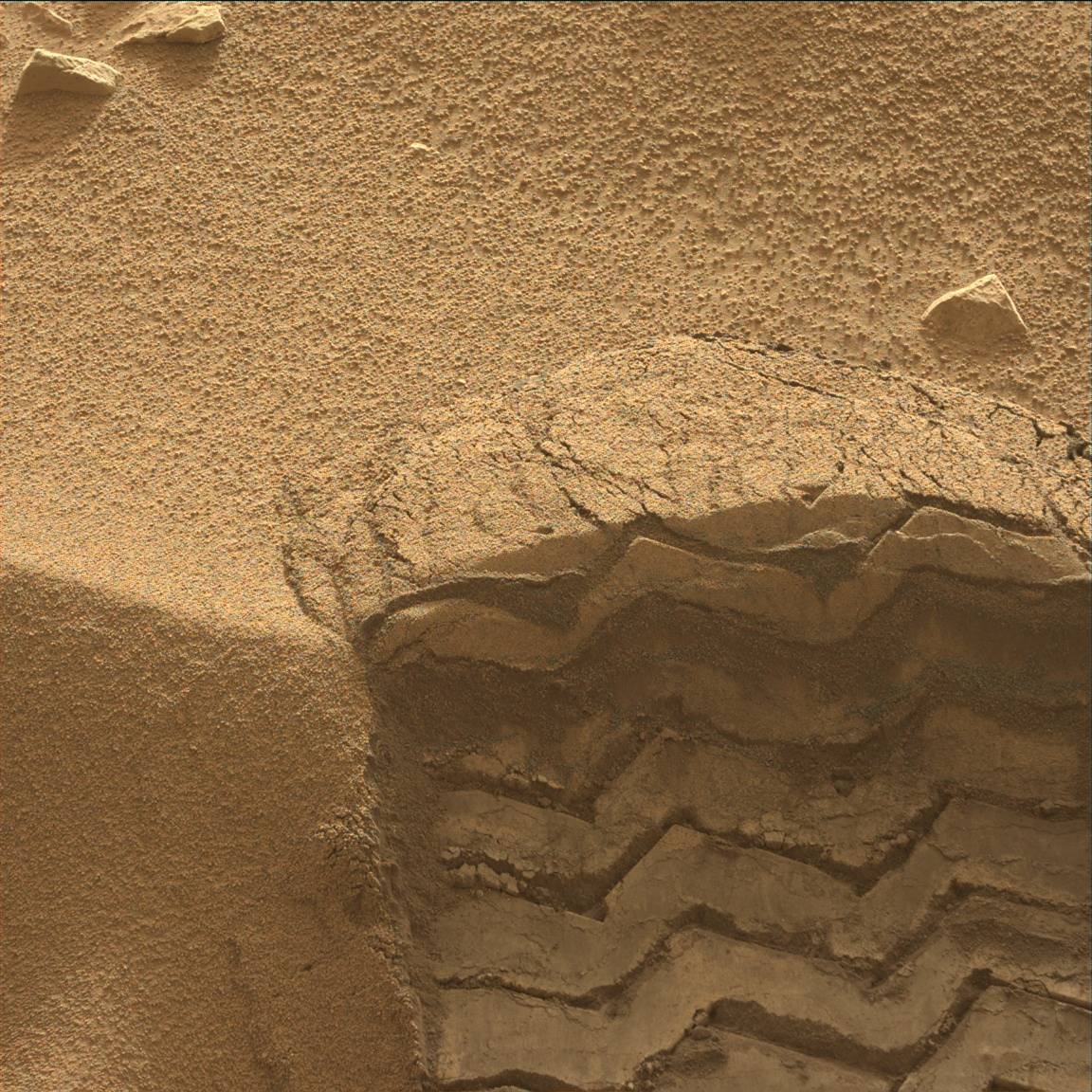
Is the 'cup' unique? No. Here's another one (bottom-center), very similar in form, at a close by location:
Again, most of the rim has thin walls around most of the circumferance.
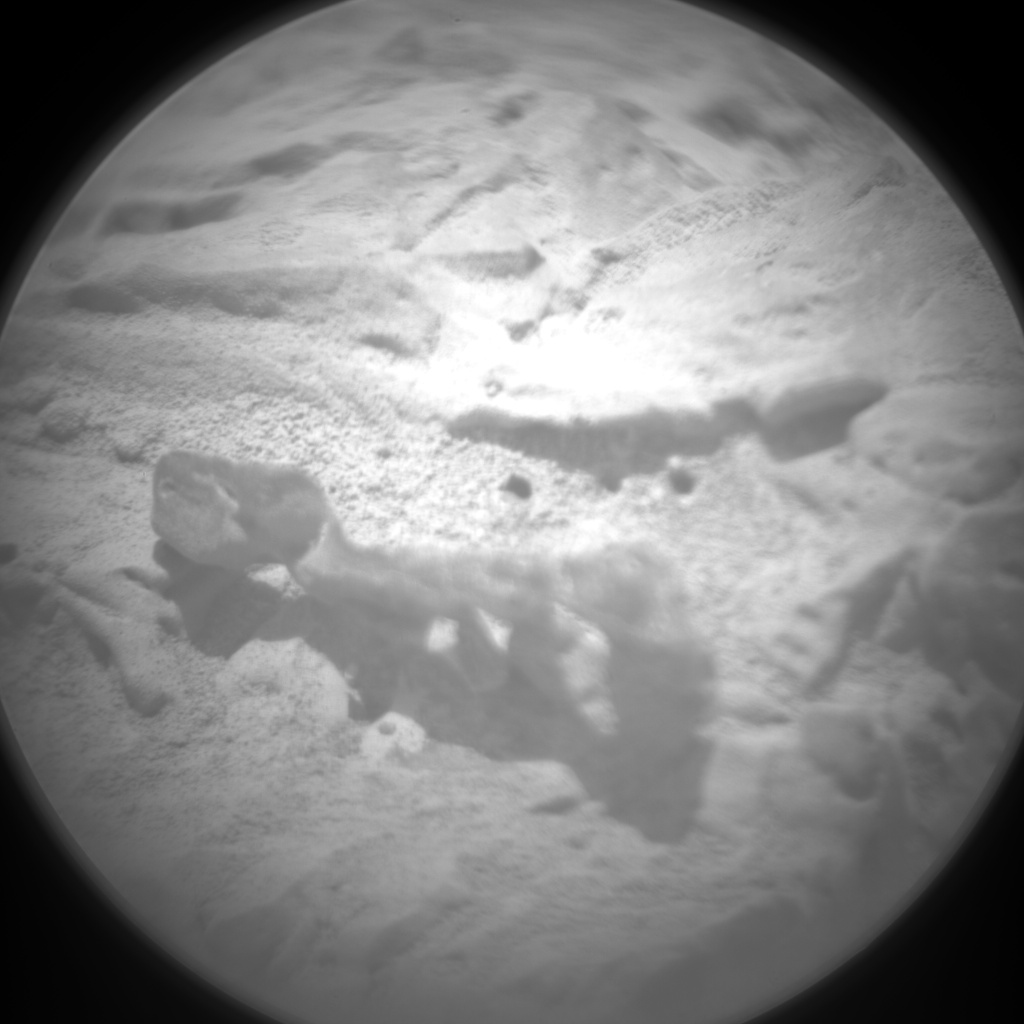
There appears to be another one in the mid-distance, left of center, in the same photos. Here's a cropped view, with the 'cup' near dead center.
The only other one I've found is not thin-walled and it's not clear if it is the same type of formation.
But like the others it appears to be embedded in similar type of layered rock, partly filled with sand.
There are many examples of thin structures that are unusual by earth standards. Presumably they would be too brittle to survive other erosion processes on earth.
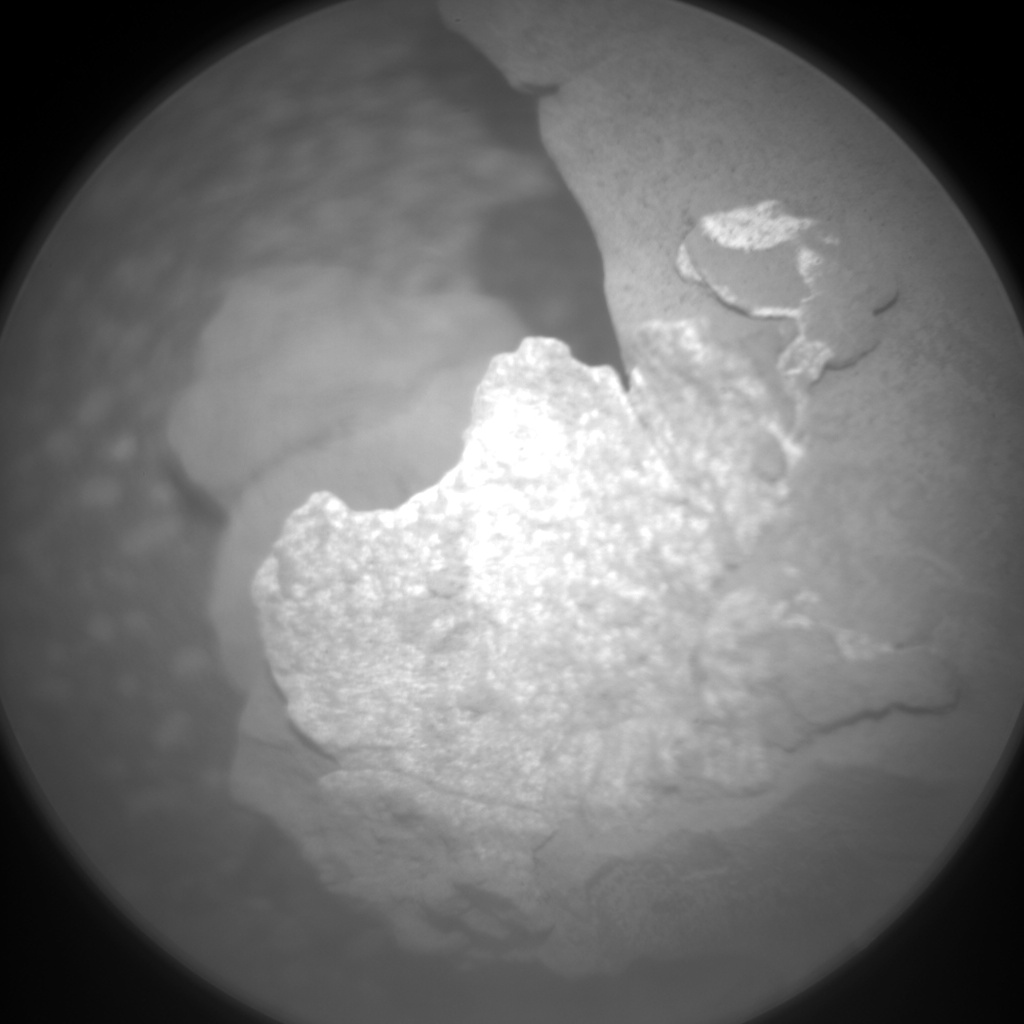
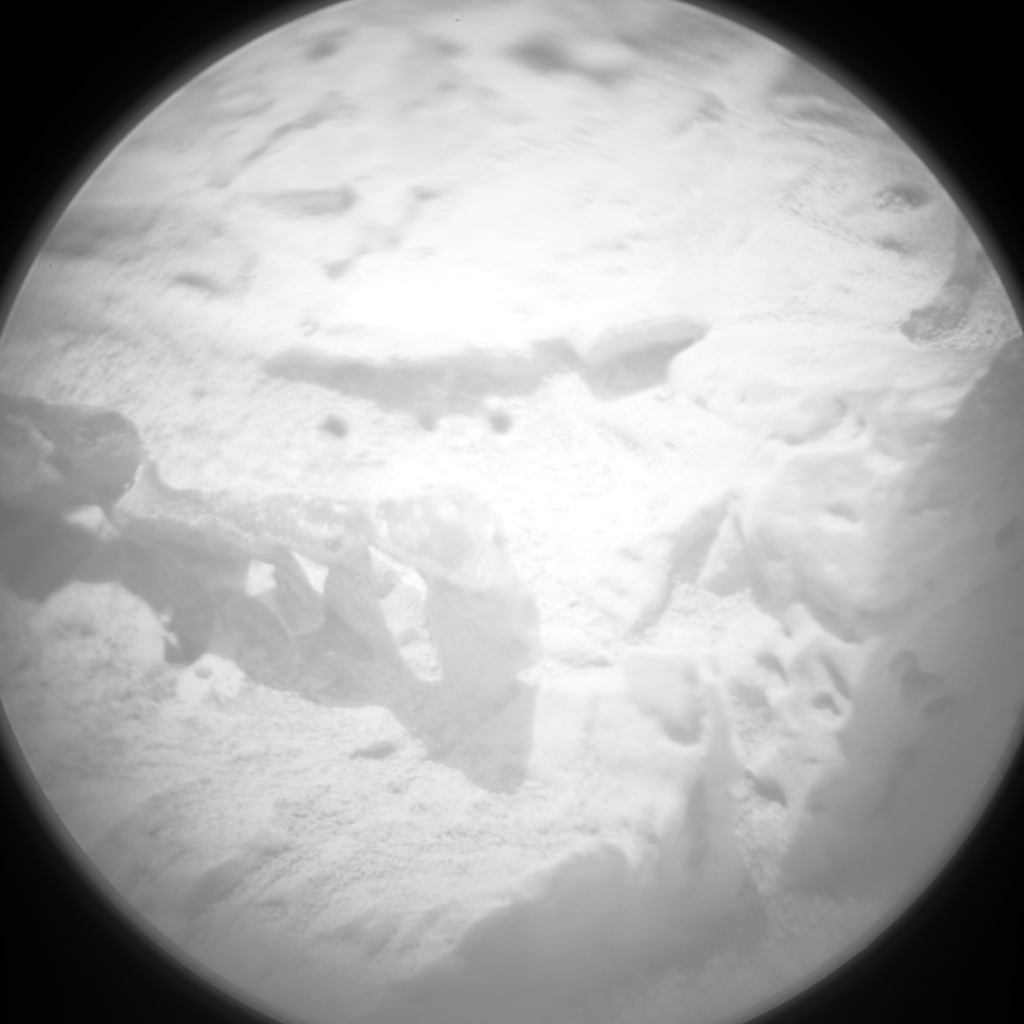
Here's a telephoto close-up view (from the Chemcam) of the edge of a layered rock in this region:
In this case it looks as if the laminations are due to preferential splitting of the source along weaker planes (contrast stretched to show color variations). If it were on earth I would expect it to be the result of
freeze-thaw weathering:
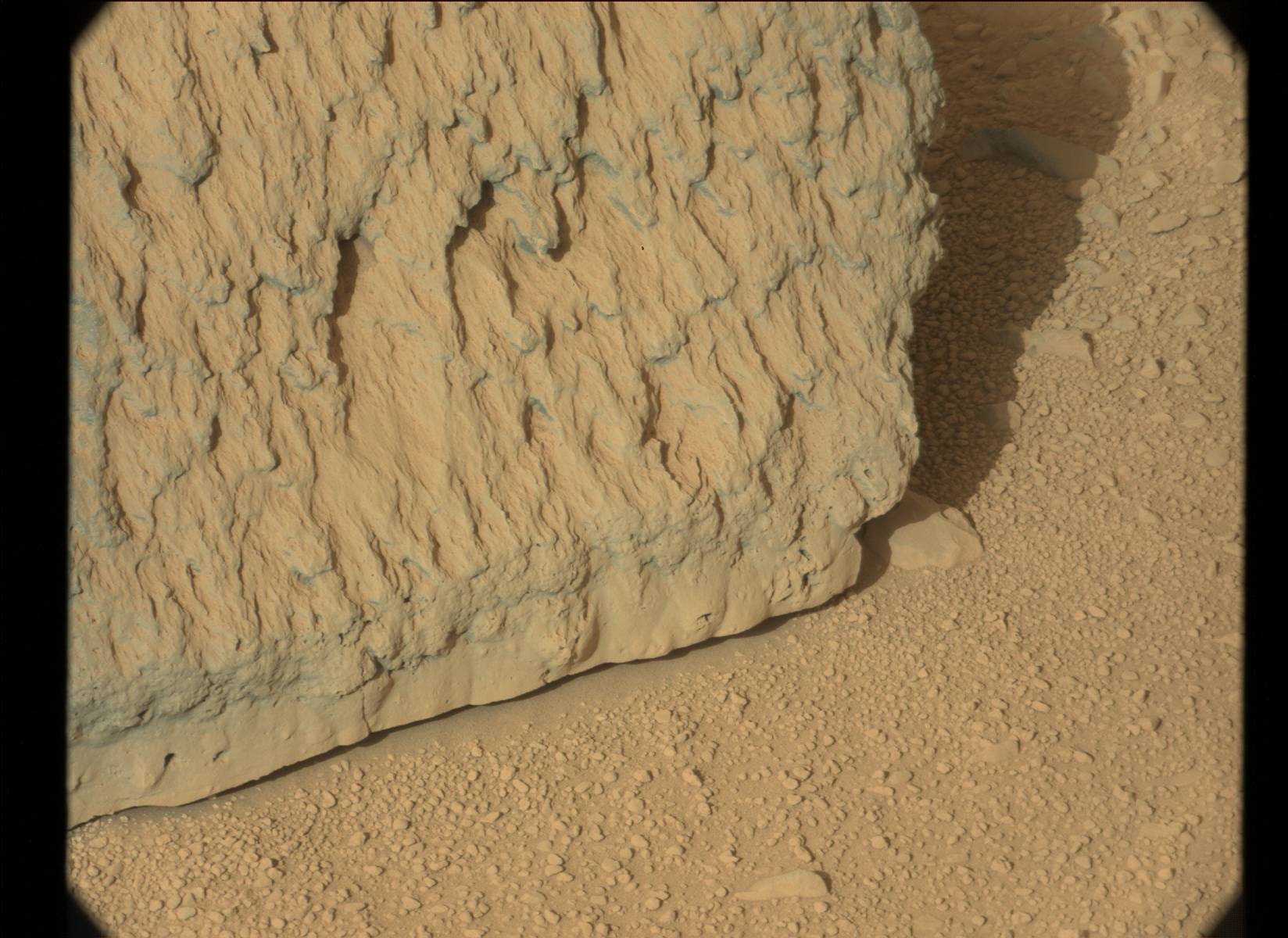
Here's a good example of laminations where harder layers are less eroded by sandblasting resulting in thin parallel sheets (contrast stretched to show color variations):
I might be wrong.


















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}